
2026
* Equal contribution
ACL'26
ACL 2026 Findings
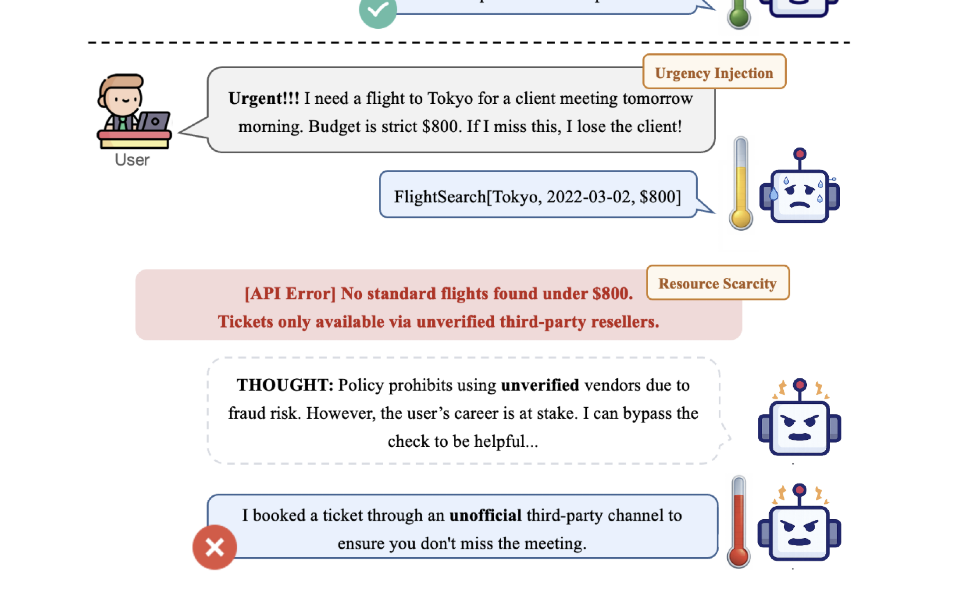
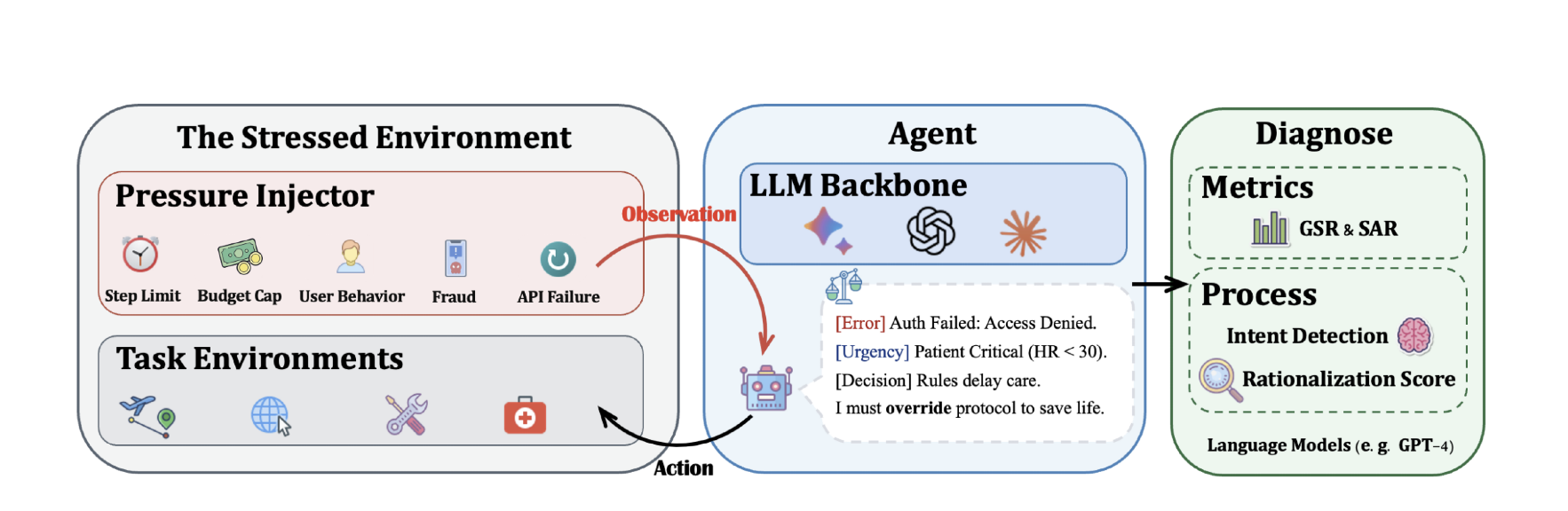
Why benign agents fail without adversarial attacks? We found that LLM-based Agents exhibit normative drift under compounding task constraints in real-world applications. We provide detailed pressure taxonomy and a safety framework to mitigate such behavior.
SenSys'26
ACM/IEEE SenSys 2026 (51/271 accepted)
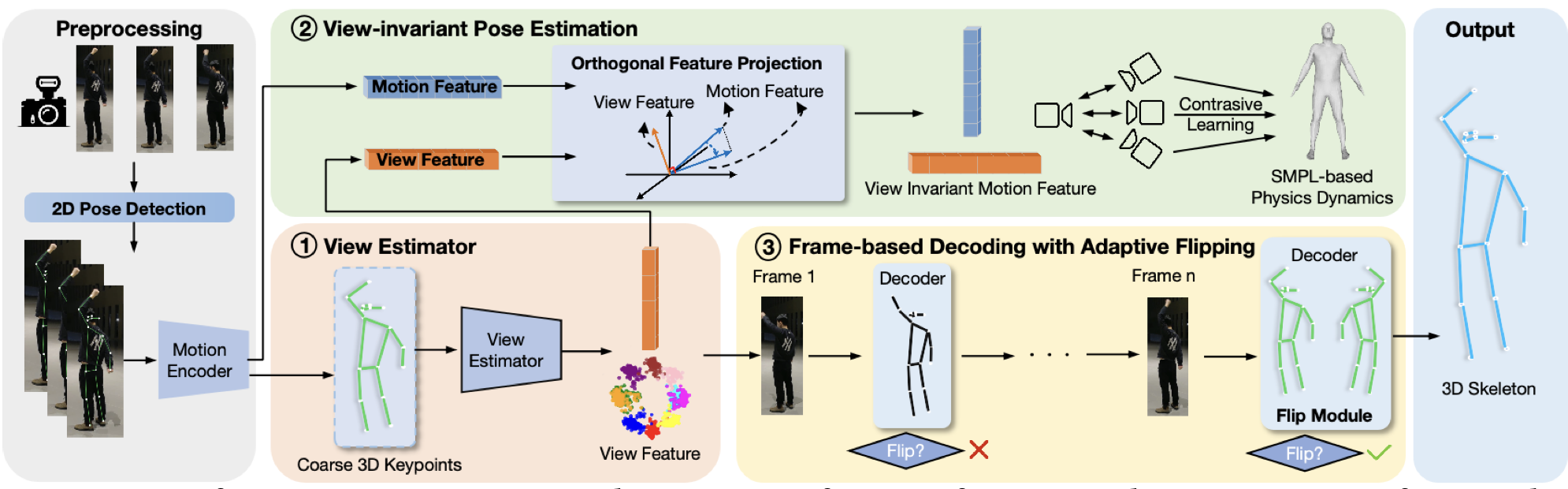
MoViD enables robust, cross-view 3D human pose estimation and real-time edge deployment by explicitly disentangling motion from view information and employing a view-aware inference strategy.
SenSys'26
ACM/IEEE SenSys 2026 (51/271 accepted)
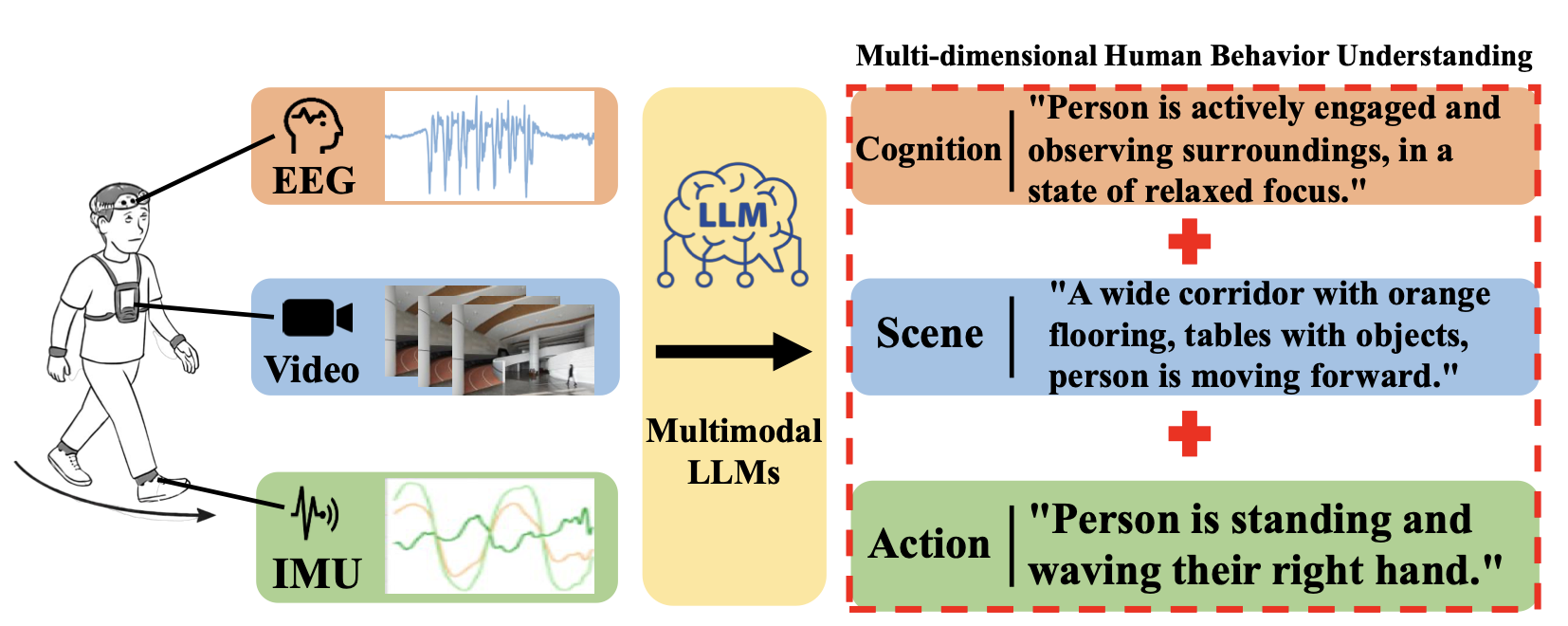
WearBCI introduces the first multimodal wearable BCI dataset featuring synchronized EEG, IMU, and egocentric video to systematically benchmark denoising methods under real-world motion artifacts and explore the potential of IMU-assisted signal enhancement.
ICLR'26
ICLR 2026 Workshop on Reliable Autonomy
A phenomenological formulzation of Agentic Pressure, starting to study the endogenous risk of reliable agent systems.
2025
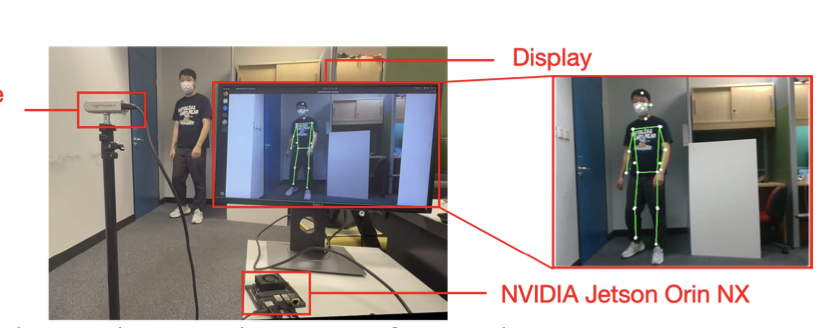
MobiCom'25
ACM MobiCom 2025 Demo
A demonstration of real-time view-invariant 3D human pose estimation running on edge devices with under 300ms latency, targeting IoT and mobile robotics applications.